
Contents
The outputs of the CCPM mixer are CYC1, CYC2 and CYC3, which need to be assigned on the MIXER screen to the channels you will connect your servos to.
The settings made here have no effect unless you are using those CYC1, CYC2 and CYC3 sources. A multirotor or flybarless helicopter which uses onboard computers/mixers will NOT use them.
To learn how to use these settings visit OpenTX University and read their CCPM for Taranis post.
Screen Layout
Editing
General editing instructions are covered on the Screen Navigation page under editing.
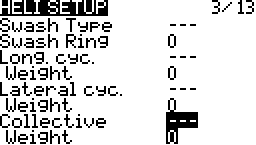
Settings
Swash Type
- 120
- 120X
- 140
- 90
Swash Ring
Limits the control authority.
Long & Lateral Cylinder And Collective
Source of control:
- Inputs – Sources configured on the inputs screen.
- Sticks – Throttle, Rudder, Elevator, Aileron
- Pots – Knobs and sliders
- MAX – 100%
- Cyclic – CYC1, CYC2, CYC3
- Trims – Throttle trim, Rudder trim, Elevator trim, Aileron trim
- Switches – Any transmitter switch
- Channels – Channels 1 to 4
- Trainer – Trainer channels 1 to 16
Weight
Controls how much of the source value to use.
Examples:
- Source 100%, Weight 100%
Output = 100% x 100/100 = 100% - Source 50%, Weight 100%
Output = 50% x 100/100 = 50% - Source 50%, Weight 50%
Output = 50% x 50/100 = 25%